Электродвигатель преобразует электрическую энергию в механическую энергию, создавая силу между противоположными магнитными полями. Электричество передается через серию катушек, магнитов и кистей, чтобы заставить вал вращаться. Коммутатор и кисти затем делают ток в повороте электромагнича и питает другие катушки, чтобы генерировать больше электричества. Этот процесс повторяется снова и снова, чтобы непрерывно вращаться двигатель. Этот тип мотора используется во всем, от автомобилей до сверл до промышленного производственного механизма.
Двигатели могут питаться путем постоянного тока (DC) от выпрямителей или батарей, или они могут быть переменным током (AC) из сетки питания или электрических генераторов. Они также могут быть однофазными или трехфазными, бесщеточными или матовыми, радиальным потоком или осевым. Существует много различных типов электродвигателей, каждый из которых предназначен для определенной цели.

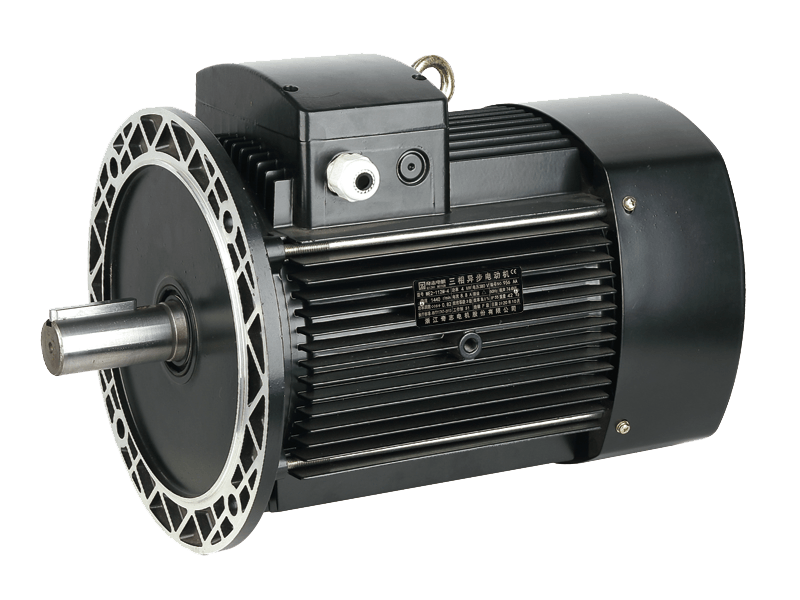
Основными частями электродвигателя являются ротор, статор и коммутатор. Ротор имеет металлические стержни и индукционные катушки вокруг него, которые составляют ядро двигателя. Коммутатор представляет собой цилиндр нескольких металлических контактных сегментов на роторе. Два или более электрических контактов, называемых щетками, изготовленными из мягкого проводящего материала, такого как углеродное прессование на каждом сегменте коммутатора, когда ротор вращается, поставляя ток на обмотки ротора. Коммутатор также периодически меняет направление тока в обмотках ротора, чтобы не допустить их перегрева.
Ротор может быть изготовлен либо из магнитных полюсов с отличным полюсом, либо с незаболезным полюсом. Роторы с дистанционным полюсом имеют прогнозы на ядре, которые создают северные или южные столбы, когда они заряжены электрическим током. В этой конфигурации ротор имеет проволочную обмотку, которая оборачивается вокруг каждого полюса, который затем образует его магнитное поле, когда ток протекает через него. Несоверные полюсные роторы имеют равномерно распределенное поле и могут быть либо заштрихованными, либо клеткой.
Двигатели с отличными полюсами более эффективны, чем моменты с незабочными полюсными магнитами, потому что они не тратят энергию, обращающую вспять полярность магнитов. Тем не менее, двигатель требует интеллектуального контроля, чтобы достичь пиковой эффективности. Это включает в себя быстрый и точный контроль тока, хорошее понимание силы-тока каждой фазы и логики, которая связывает все это вместе с низкой задержкой.
Чтобы правильно вращать электродвигатель, он должен иметь ток, который пропорционален его мощности, и который равняется сумме его силовых значений на тока по всем электрическим углам. Это называется постоянной двигателя и найдено с использованием уравнения 6.
Чтобы выяснить, каким должно быть это число, вам нужно знать, какой ток каждый этап рисует во время запуска. Это измеряется как усилители с заблокированным ротором (LRA), что происходит мгновенно во время запуска, и RLA-RATED AMP, которые представляют собой ток, который двигатель должен тянуть в всех условиях работы. Чтобы получить точную ценность, вам нужно сделать некоторую сложную математику и использовать программное приложение для мотоцикла.






 English
English 中文简体
中文简体 Español
Español